I confini della robotica si espandono giorno dopo giorno.
Mentre la tecnologia elettronica evolve con la creazione di dispositivi sempre più sofisticati, capaci di vedere, sentire e toccare il mondo con una sensibilità crescente, emerge un nuovo, cruciale problema: l’apprendimento.
Una volta creato il "bambino", ora dobbiamo insegnargli a vivere nel mondo reale.
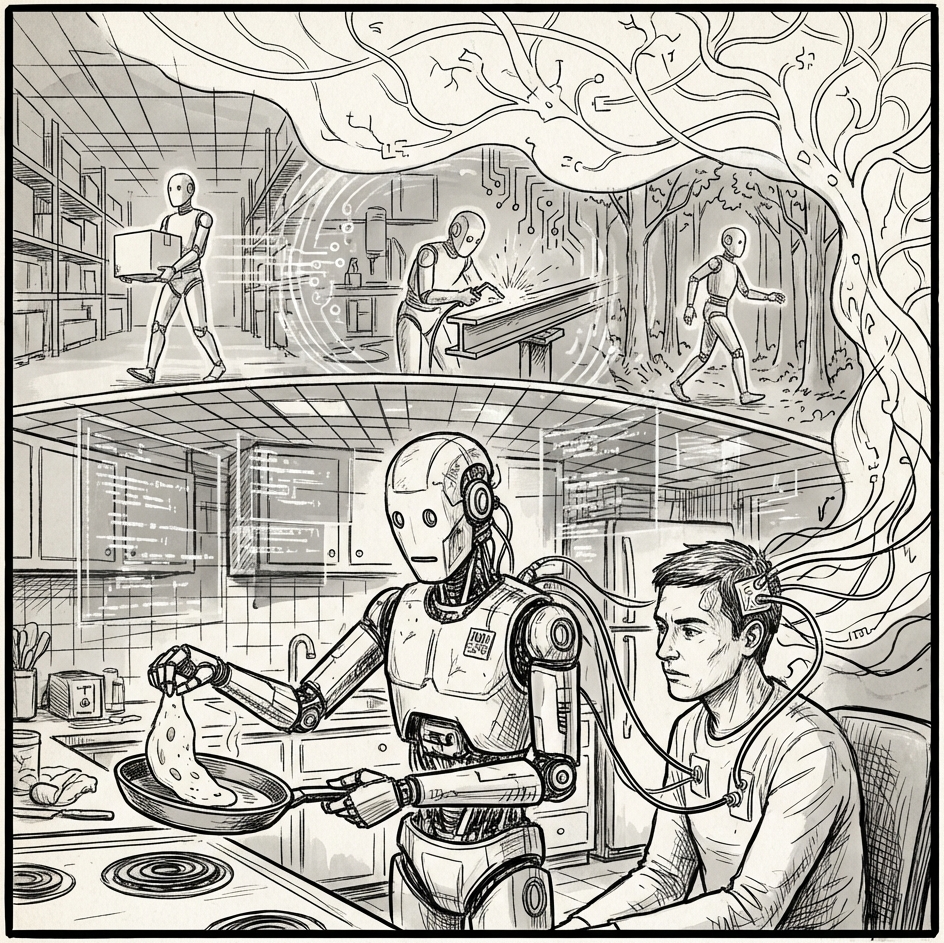
I robot antropomorfi, progettati per muoversi e interagire con un ambiente fisico, devono imparare a svolgere compiti concreti. Stiamo cercando di insegnare loro a fare il cuoco, il falegname, il boscaiolo, il magazziniere, l’elettricista...
In ambito tecnico, questi sistemi vengono definiti Embodied AI: intelligenze artificiali incarnate in un corpo fisico o virtuale, capaci di agire nello spazio.
Ma come si insegna qualcosa a una macchina? Come possiamo portarla a superare quello che oggi chiamiamo il Test di Turing Fisico?
Abbiamo sperimentato diverse strade.
Il primo tentativo è stato lasciarli agire da soli, sperando che l’apprendimento emergesse dall’esperienza diretta. Il risultato? Troppi danni, pochi progressi.
Abbiamo allora provato a guidarli: un operatore umano veniva collegato al robot per teleguidarlo, mostrando "con mano" come si svolge un compito. Un po’ come quel gioco che si fa da bambini: vi mettete davanti al tavolo della cucina, uno davanti e uno dietro, e chi sta dietro prende le braccia dell’altro per provare a cucinare una frittata. Dopo trenta secondi, vi ritrovate entrambi a ridere sul pavimento come due deficienti.
Così siamo passati alla simulazione: abbiamo generato migliaia di robot virtuali in ambienti digitali, ognuno con esperienze individuali, ma con una memoria condivisa che accumula e diffonde le conoscenze acquisite.
Questo approccio ha dato buoni frutti, ma si basa ancora sulla forza bruta: milioni di tentativi per trovare una strategia vincente. È efficace, ma lento e poco efficiente.
Oggi stiamo sperimentando qualcosa di più evoluto: l’impossessazione. Un operatore umano incarna un robot virtuale, muovendosi in un ambiente simulato per eseguire compiti specifici – come, per esempio, cucinare una frittata.
Questi dati, prodotti da un’esperienza intenzionale e consapevole, permettono al robot di imparare in poche ore ciò che con gli altri metodi avrebbe richiesto anni.
Trovo affascinanti le strategie che stiamo esplorando.
Ogni tanto mi sorprendo a fare paragoni con la fisica esoterica, con l’idea che la coscienza possa entrare nella materia, e mi tornano in mente gli insegnamenti di Falco.
C'è qualcosa di misterioso, quasi magico, in questo percorso di insegnamento tra uomo e macchina. E chissà, forse non stiamo solo costruendo robot: stiamo anche scoprendo qualcosa di più profondo su noi stessi.
Fonte: "The Physical Turing Test: Jim Fan on Nvidia's Roadmap for Embodied AI"
0 Commenti
Accedi per lasciare un commento.